Punto material
¿Qué es un punto material?
Un punto material es un modelo idealizado utilizado en física en el que toda la masa de un cuerpo se considera concentrada en un único punto del espacio. Como este modelo no tiene dimensiones ni forma geométrica, no permite describir fenómenos como la rotación o la deformación. Esta simplificación resulta muy útil cuando el tamaño del objeto es insignificante en comparación con las distancias involucradas en el problema.
El punto material es uno de los conceptos más utilizados en mecánica clásica porque permite estudiar el movimiento de los cuerpos de una forma mucho más sencilla.
Desempeña un papel fundamental en la cinemática del punto material y en la dinámica del punto material, áreas de la física que analizan cómo se mueven los cuerpos y cuáles son las causas de ese movimiento.
Habitualmente, los puntos materiales se representan mediante sistemas de coordenadas cartesianas de dos o tres dimensiones.
La gráfica anterior muestra la posición en función del tiempo y la trayectoria de un punto material que se desplaza a lo largo de una recta.
¿Cuándo puede considerarse un objeto un punto material?
Un objeto puede modelarse como un punto material cuando sus dimensiones son muy pequeñas en comparación con las distancias características del fenómeno que se desea estudiar. Esta aproximación también es válida cuando la rotación y las deformaciones del cuerpo apenas influyen en el resultado del análisis.
En la práctica, un punto material puede representar objetos tan diferentes como una persona, un tren, un automóvil o una partícula microscópica.
Incluso la Tierra suele tratarse como un punto material cuando se estudia su movimiento alrededor del Sol.
Nota. En mecánica orbital, el diámetro de la Tierra es muy pequeño comparado con la distancia que la separa del Sol. Por esta razón, en muchos cálculos resulta razonable representarla como un punto material. Sin embargo, esta aproximación deja de ser adecuada cuando se estudian fenómenos como la rotación terrestre o las mareas, donde el tamaño y la forma del planeta son factores importantes.
Un ejemplo práctico
Imaginemos un sistema de radar que supervisa el tráfico aéreo de una extensa región.
En la pantalla del radar, cada avión aparece representado como un punto material identificado por las coordenadas \( (x,y,z) \), donde \( z \) corresponde a la altitud.
Esta aproximación funciona porque las dimensiones de una aeronave son extremadamente pequeñas en comparación con el área cubierta por el radar.

Representar un avión como un punto material permite analizar su movimiento sin tener que considerar detalles como la resistencia del aire, las condiciones atmosféricas o las características aerodinámicas de la aeronave.
Evidentemente, un avión real no es un punto material. Tiene masa, forma y dimensiones físicas, y su interacción con el aire es mucho más compleja.
Sin embargo, si el objetivo es determinar su posición, velocidad y trayectoria, incorporar todos esos detalles haría el análisis más complicado sin aportar información realmente útil.
En el seguimiento por radar, las magnitudes más relevantes son la función de posición, las coordenadas \( (x,y,z) \), la dirección del movimiento, la velocidad y la aceleración instantánea.
Por ello, representar la aeronave como un punto material es una solución sencilla y eficaz.
Nota. Esta misma idea se utiliza en los sistemas de navegación GPS, donde automóviles, barcos y otros vehículos suelen modelarse como puntos materiales cuando solo interesa conocer su posición y su movimiento.
Centro de masa
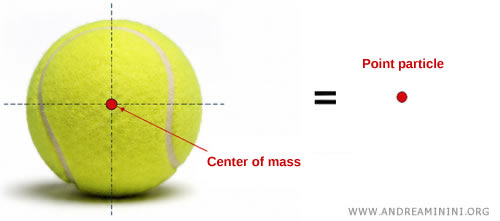
Cuando un objeto se aproxima mediante un punto material, el punto elegido suele coincidir con su centro de masa.
El centro de masa es el punto en el que puede considerarse concentrada toda la masa de un cuerpo para estudiar su movimiento.
Aunque la masa está distribuida por todo el volumen del objeto, en muchos problemas es posible describir su comportamiento con gran precisión siguiendo únicamente la trayectoria de su centro de masa.
Ejemplo
Cuando una pelota se lanza al aire, la trayectoria de su centro de masa sigue las leyes del movimiento parabólico.
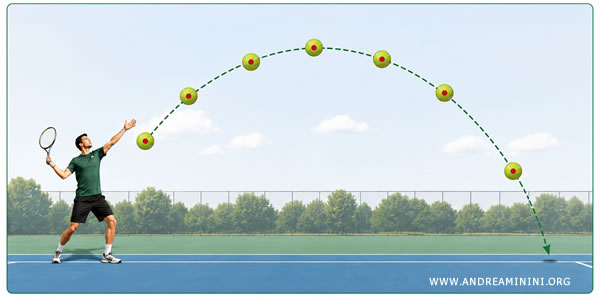
Por esta razón, cuando el tamaño de la pelota y los efectos de su rotación no son relevantes, todo el objeto puede representarse como un punto material situado en su centro de masa.
Nota. Si la masa está distribuida uniformemente y el objeto tiene una forma geométrica regular, el centro de masa suele coincidir con el centro geométrico. Por ejemplo, en un rectángulo o en un cubo se encuentra en la intersección de sus diagonales.
Punto material, sólido rígido y cuerpo deformable
Los físicos utilizan distintos modelos según el nivel de detalle que requiere cada problema. Los tres más comunes son el punto material, el sólido rígido y el cuerpo deformable.
- Punto material
En este modelo, un objeto se describe únicamente por su masa y su posición. Su forma, sus dimensiones y su rotación se ignoran. Como se supone que no tiene tamaño, solo puede estudiarse su movimiento de traslación. Es el modelo más simple y abstracto de la mecánica.
Por ejemplo, si una pelota de tenis se modela como un punto material, únicamente se consideran su masa y la trayectoria de su centro de masa. Su tamaño, su forma y su giro quedan fuera del análisis.
- Sólido rígido
Un sólido rígido posee masa, forma y dimensiones. A diferencia de un punto material, puede desplazarse y también rotar. La característica principal de este modelo es que la distancia entre dos puntos cualesquiera del cuerpo permanece constante. Aunque se ignoran las deformaciones, el punto de aplicación de las fuerzas resulta esencial para describir su movimiento.
Por ejemplo, cuando una pelota de tenis es golpeada por una raqueta, puede adquirir efecto dependiendo de cómo se aplique la fuerza. En el modelo de sólido rígido se supone que la pelota no se deforma durante el impacto.
- Cuerpo deformable
Un cuerpo deformable es el modelo más cercano a la realidad. Tiene masa, forma y dimensiones, y puede tanto rotar como deformarse. En consecuencia, la distancia entre dos puntos del objeto puede variar con el tiempo.
Por ejemplo, cuando una pelota de tenis rebota contra el suelo, se comprime durante un breve instante y cambia temporalmente de forma. Para describir este fenómeno con precisión es necesario considerar la deformación del cuerpo.
Estos tres modelos representan distintos niveles de aproximación y permiten elegir la descripción más adecuada para cada problema físico.



