Point matériel
Qu'est-ce qu'un point matériel ?
Un point matériel est un modèle idéal utilisé en physique dans lequel toute la masse d'un objet est supposée concentrée en un unique point de l'espace. Ce point ne possède ni dimensions ni forme géométrique. Il est donc impossible de décrire avec ce modèle des phénomènes tels que la rotation ou les déformations du corps. Cette simplification est néanmoins extrêmement utile lorsque la taille de l'objet est négligeable par rapport aux distances mises en jeu.
Le point matériel est l'un des concepts fondamentaux de la mécanique classique. Grâce à lui, il est possible d'étudier le mouvement des corps sans tenir compte de détails qui n'ont qu'une influence minime sur le phénomène observé.
Ce modèle est au cœur de la cinématique du point matériel et de la dynamique du point matériel, deux domaines qui analysent respectivement le mouvement des corps et les causes de ce mouvement.
Dans la plupart des cas, un point matériel est représenté dans un système de coordonnées cartésiennes à deux ou trois dimensions.
Le graphique ci-dessus illustre la position en fonction du temps ainsi que la trajectoire d'un point matériel se déplaçant le long d'une droite.
Quand un objet peut-il être considéré comme un point matériel ?
Un objet peut être assimilé à un point matériel lorsque ses dimensions sont très petites par rapport aux distances caractéristiques du phénomène étudié. Cette approximation est également valable lorsque les effets liés à la rotation ou aux déformations du corps peuvent être négligés.
En pratique, un point matériel peut représenter des objets très différents, comme une personne, un train, une automobile ou encore une particule microscopique.
La Terre elle-même est souvent considérée comme un point matériel lorsqu'on étudie son mouvement autour du Soleil.
Remarque. En mécanique orbitale, le diamètre de la Terre est extrêmement faible par rapport à la distance qui la sépare du Soleil. Dans ce contexte, la représenter par un point matériel permet de simplifier considérablement les calculs. En revanche, cette approximation n'est plus adaptée pour étudier des phénomènes comme la rotation terrestre ou les marées, où la taille et la forme de la planète deviennent essentielles.
Un exemple concret
Imaginons un radar chargé de surveiller le trafic aérien sur une vaste zone géographique.
Sur l'écran du radar, chaque avion apparaît sous la forme d'un point matériel repéré par les coordonnées \( (x,y,z) \), où \( z \) représente l'altitude.
Cette représentation est pertinente parce que les dimensions d'un avion sont infimes comparées à l'étendue de la zone observée par le radar.

En modélisant l'avion comme un point matériel, il devient possible d'étudier sa trajectoire sans tenir compte de nombreux détails, tels que sa forme exacte, les forces aérodynamiques ou les conditions atmosphériques.
Bien entendu, un avion réel possède une masse, des dimensions et une géométrie complexe. Toutefois, lorsque l'on cherche uniquement à connaître sa position, sa vitesse ou sa trajectoire, ces informations supplémentaires ne sont généralement pas indispensables.
Dans le suivi radar, les grandeurs les plus importantes sont la fonction de position, les coordonnées \( (x,y,z) \), la direction du mouvement, la vitesse et l'accélération instantanée.
Pour cette raison, représenter l'avion par un point matériel constitue une approximation simple, efficace et largement utilisée.
Remarque. Le même principe est employé dans les systèmes de navigation GPS. Les voitures, les navires ou d'autres véhicules y sont souvent assimilés à des points matériels lorsque seules leur position et leur trajectoire sont étudiées.
Centre de masse
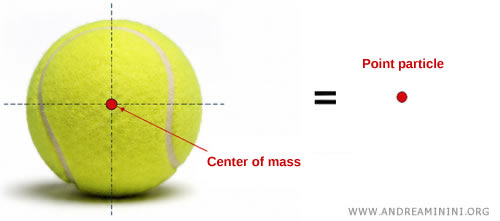
Lorsqu'un objet est représenté par un point matériel, le point choisi correspond généralement à son centre de masse.
Le centre de masse est le point auquel toute la masse d'un corps peut être considérée comme concentrée pour l'étude de son mouvement.
Bien que la masse soit en réalité répartie dans tout le volume de l'objet, il est souvent possible de décrire son mouvement avec une grande précision en suivant uniquement la trajectoire de son centre de masse.
Exemple
Lorsqu'une balle est lancée dans les airs, la trajectoire de son centre de masse suit les lois du mouvement parabolique.
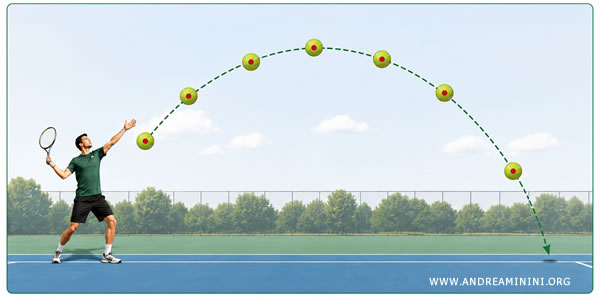
C'est pourquoi, lorsque les dimensions de la balle et les effets de sa rotation sont négligeables, l'ensemble de l'objet peut être remplacé par un point matériel situé en son centre de masse.
Remarque. Lorsque la masse est répartie uniformément et que l'objet possède une forme géométrique régulière, le centre de masse coïncide généralement avec le centre géométrique. Dans un rectangle ou un cube, par exemple, il se trouve à l'intersection des diagonales.
Point matériel, solide rigide et corps déformable
Selon le degré de précision recherché, les physiciens utilisent différents modèles pour représenter les objets. Les trois plus courants sont le point matériel, le solide rigide et le corps déformable.
- Point matériel
Dans ce modèle, un objet est décrit uniquement par sa masse et sa position. Sa forme, ses dimensions et sa rotation ne sont pas prises en compte. Comme il est supposé sans extension spatiale, seul son mouvement de translation est étudié. Il s'agit du modèle le plus simple de la mécanique.
Par exemple, si une balle de tennis est modélisée comme un point matériel, seules sa masse et la trajectoire de son centre de masse sont considérées. Sa taille, sa forme et sa rotation sont ignorées.
- Solide rigide
Un solide rigide possède une masse, une forme et des dimensions. Contrairement au point matériel, il peut non seulement se déplacer, mais aussi tourner. Sa caractéristique principale est que la distance entre deux points quelconques du corps reste constante au cours du temps. Les déformations sont négligées, mais l'application des forces joue un rôle essentiel dans l'étude du mouvement.
Par exemple, lorsqu'une balle de tennis est frappée par une raquette, elle peut acquérir un effet selon la manière dont la force est appliquée. Dans le modèle du solide rigide, la balle est supposée ne pas se déformer pendant le choc.
- Corps déformable
Un corps déformable est le modèle le plus proche de la réalité. Il possède une masse, une forme et des dimensions, et peut à la fois tourner et se déformer. La distance entre deux points du corps peut alors varier au cours du temps.
Par exemple, lorsqu'une balle de tennis rebondit sur le sol, elle se comprime brièvement avant de retrouver sa forme initiale. Pour décrire correctement ce phénomène, il est indispensable de prendre en compte la déformation du corps.
Ces trois modèles correspondent à des niveaux d'approximation différents. Le choix de l'un ou de l'autre dépend toujours du phénomène étudié et du degré de précision recherché.



