Équation cartésienne de la droite
La forme explicite de l’équation d’une droite s’écrit $$ y = mx + q $$ où m est le coefficient directeur et q l’ordonnée à l’origine, c’est-à-dire la valeur de y lorsque la droite coupe l’axe des ordonnées.
Cette écriture est dite explicite parce que y apparaît directement comme une fonction de x.
$$ y = mx + q $$
Dans ce modèle, x est la variable indépendante. La valeur de y en dépend.
Le coefficient directeur m détermine l’inclinaison de la droite.
L’ordonnée à l’origine q fixe la position verticale de la droite. Lorsque q varie, la droite se translate vers le haut ou vers le bas sans changer d’inclinaison.
La forme explicite permet ainsi de représenter toute droite du plan, sauf les droites verticales.
Droites verticales
L’axe des ordonnées possède une équation particulière :
$$ x = 0 $$
Toute droite parallèle à cet axe s’écrit :
$$ x = k $$
Remarque. Une droite verticale ne peut pas être décrite par y = mx + q, car le coefficient directeur n’y est pas défini.
Il n’existe donc aucune valeur de m ni de q permettant d’obtenir une droite verticale avec y = mx + q. C’est pourquoi on utilise une équation du type $$ x = k $$ Lorsque k varie, on obtient toutes les droites verticales. Pour k = 0, on retrouve l’axe des ordonnées.
Forme implicite (forme générale)
La forme implicite de l’équation d’une droite, appelée aussi forme générale, s’écrit $$ ax + by + c = 0 $$ où a, b et c sont des nombres réels.
Ici, x et y interviennent symétriquement. Aucune variable n’est isolée.
En faisant varier les coefficients, cette écriture permet de représenter n’importe quelle droite du plan cartésien.
/es/math/teorema-de-tales
Remarque. Les coefficients a et b ne peuvent pas être simultanément nuls.
La forme générale inclut naturellement le cas des droites verticales.
Remarque. Pour obtenir une droite verticale, il suffit de poser b = 0 :
$$ ax + by + c = 0 $$
$$ ax + 0 \cdot y + c = 0 $$
$$ ax + c = 0 $$
$$ x = - \frac{c}{a} $$
Démonstration
Considérons deux points distincts P1(x1, y1) et P2(x2, y2) appartenant à une droite r. Soit P(x, y) un point quelconque de cette droite.
Projetons ces points sur les axes de coordonnées.
Les droites verticales coupent la droite r et l’axe des abscisses. D’après le théorème de Thalès, les segments interceptés sont proportionnels :
$$ \frac{ \overline{P_1P} }{ \overline{AB} } = \frac{ \overline{P_1P_2} }{ \overline{AC} } $$
$$ \frac{ \overline{P_1P} }{ \overline{P_1P_2} } = \frac{ \overline{AB} }{ \overline{AC} } $$
Les droites horizontales conduisent de la même façon à :
$$ \frac{ \overline{P_1P} }{ \overline{DE} } = \frac{ \overline{P_1P_2} }{ \overline{DF} } $$
$$ \frac{ \overline{P_1P} }{ \overline{P_1P_2} } = \frac{ \overline{DE} }{ \overline{DF} } $$
On en déduit :
$$ \frac{ \overline{AB} }{ \overline{AC} } = \frac{ \overline{DE} }{ \overline{DF} } $$
Or AB = x - x1, AC = x2 - x1, DE = y - y1, DF = y2 - y1 :
$$ \frac{ x - x_1 }{ x_2 - x_1 } = \frac{ y - y_1 }{ y_2 - y_1 } $$
Cette égalité exprime la condition d’alignement.
Après développement :
$$ ( x - x_1 ) ( y_2 - y_1 ) = ( y - y_1 ) ( x_2 - x_1 ) $$
$$ x ( y_2 - y_1 ) - x_1 ( y_2 - y_1 ) = y ( x_2 - x_1 ) - y_1 ( x_2 - x_1 ) $$
$$ x ( y_2 - y_1 ) - y ( x_2 - x_1 ) - x_1 y_2 + x_2 y_1 = 0 $$
En posant a = y2 - y1, b = x1 - x2, c = -x1y2 + x2y1 :
$$ ax + by + c = 0 $$
Conversion vers la forme explicite
À partir de $$ ax + by + c = 0 $$ on isole y :
$$ y = - \frac{a}{b} x - \frac{c}{b} $$
On identifie alors :
$$ m = - \frac{a}{b}, \quad q = - \frac{c}{b} $$
Cette conversion est possible uniquement si b ≠ 0.
Remarque. Si b = 0, la droite est verticale.
Exemple
$$ 3y + 6x + 9 = 0 $$
$$ 3y = -6x - 9 $$
$$ \frac{3y}{3} = - \frac{6}{3}x - \frac{9}{3} $$
$$ y = -2x - 3 $$
Forme implicite ou explicite ? Les deux écritures décrivent la même droite. Le choix dépend du contexte et de l’usage recherché.
Forme implicite d'une droite comme intersection de deux plans
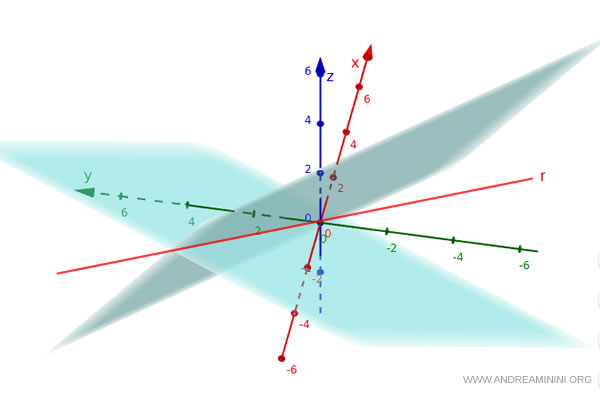
Dans l'espace tridimensionnel, une droite peut être décrite comme l'intersection de deux plans distincts et non parallèles. Cette représentation s'exprime à l'aide d'un système de deux équations linéaires :
$$ \begin{cases} a_1 x + b_1 y + c_1 z + d_1 = 0 \\ \\ a_2 x + b_2 y + c_2 z + d_2 = 0 \end{cases} $$
En géométrie analytique, une droite de l'espace, dans $\mathbb{R}^3$, peut être écrite sous plusieurs formes selon le contexte.
La forme implicite est l'une des plus utilisées. Elle consiste à représenter la droite comme un système de deux équations de plans.
Rappelons qu'un plan de l'espace est défini par une équation du type :
$$ a x + b y + c z + d = 0 $$
Lorsque deux plans distincts se coupent, leur intersection est une droite. On obtient alors :
$$
\begin{cases}
a_1 x + b_1 y + c_1 z + d_1 = 0 \\ \\
a_2 x + b_2 y + c_2 z + d_2 = 0
\end{cases}
$$
Ces deux relations constituent les équations générales d'une droite. Chaque équation correspond à un plan.
Le système impose simultanément deux contraintes aux points $(x, y, z)$. Les points qui satisfont les deux équations appartiennent aux deux plans. Ils se trouvent donc exactement sur leur droite d'intersection.
L'intersection de deux plans distincts et non parallèles définit une droite $ r $.

Cette description n'est pas unique. Une infinité de couples de plans peuvent avoir pour intersection la même droite.

L'ensemble des plans contenant une droite donnée est appelé faisceau de plans.
Pourquoi parle-t-on de forme implicite ? Parce que cette écriture ne fournit pas directement un vecteur directeur ni une paramétrisation explicite des points de la droite. La droite apparaît comme l'ensemble des solutions communes aux deux équations.
Exemple
Considérons les deux plans :
$$
\begin{cases}
x + y + z - 1 = 0 \\
2x - y + 3z + 4 = 0
\end{cases}
$$
Les points $(x, y, z)$ qui vérifient simultanément ces deux équations appartiennent à une même droite de l'espace.
Équations de la droite en forme bivariante
La forme bivariante décrit une droite en exprimant deux coordonnées en fonction de la troisième.
Par exemple, on peut exprimer \( x \) et \( y \) en fonction de \( z \) :
$$ \begin{cases} a_1 x + b_1 y + c_1 z + d_1 = 0 \\ \\ a_2 x + b_2 y + c_2 z + d_2 = 0 \end{cases}\quad\Longrightarrow\quad \begin{cases} x = gz + p \\ \\ y = hz + q \end{cases} $$
On peut aussi exprimer \( x \) et \( z \) en fonction de \( y \) :
$$ \begin{cases} x = ky + r \\ \\ z = jy + s \end{cases} $$
Ou encore \( y \) et \( z \) en fonction de \( x \) :
$$ \begin{cases} y = mx + t \\ \\ z = nx + u \end{cases} $$
Cette écriture revient à paramétrer la droite à l'aide d'une coordonnée de l'espace.
En attribuant des valeurs arbitraires à la variable choisie, on génère des points appartenant à la droite.
Remarque. La variable retenue doit effectivement varier le long de la droite. Si la droite est parallèle au plan \( xy \), la coordonnée \( z \) reste constante. Elle ne peut donc pas servir de paramètre. Le même principe s'applique aux droites parallèles aux plans \( xz \) ou \( yz \).
Exemple
Considérons la droite définie par :
$$ \begin{cases} x + y - z = 0 \quad \text{(1)} \\ 2x - y + 3z = 5 \quad \text{(2)} \end{cases} $$
Déterminons la forme bivariante en exprimant \( x \) et \( y \) en fonction de \( z \).
Additionnons les deux équations afin d'éliminer \( y \) :
$$ \begin{cases} x + 2x + y - y - z + 3z = 0 + 5 \\ 2x - y + 3z = 5 \end{cases} $$
$$ \begin{cases} 3x + 2z = 5 \\ 2x - y + 3z = 5 \end{cases} $$
Isolons \( x \) :
$$ \begin{cases} x = \frac{5 - 2z}{3} \\ 2x - y + 3z = 5 \end{cases} $$
Substituons dans la seconde équation :
$$ \begin{cases} x = \frac{5 - 2z}{3} \\ 2\left(\frac{5 - 2z}{3}\right) - y + 3z = 5 \end{cases} $$
$$ \begin{cases} x = \frac{5 - 2z}{3} \\ \frac{10 - 4z}{3} - y + 3z = 5 \end{cases} $$
Isolons \( y \) :
$$ y = \frac{10 - 4z}{3} - 5 + 3z $$
$$ y = \frac{10 - 4z - 15 + 9z}{3} $$
Simplifions :
$$ y = \frac{5z - 5}{3} $$
La forme bivariante est :
$$ \begin{cases} x = \frac{5 - 2z}{3} \\ \\ y = \frac{5z - 5}{3} \end{cases} $$
Quel que soit le procédé algébrique utilisé, on obtient une représentation équivalente de la droite. Ici, l'addition des équations offrait une démarche simple et directe.
Équations fractionnaires et paramétriques d'une droite
Étant donnés deux points distincts $A(x_1, y_1, z_1)$ et $B(x_2, y_2, z_2)$, la droite $(AB)$ peut se représenter par les équations fractionnaires : $$ \frac{x - x_1}{l} = \frac{y - y_1}{m} = \frac{z - z_1}{n} $$ avec $$ l = x_2 - x_1,\quad m = y_2 - y_1,\quad n = z_2 - z_1. $$ Les nombres $l, m, n$ sont appelés rapports directeurs de la droite.
Cette écriture condense en une seule relation la manière dont varient les coordonnées $x$, $y$ et $z$ lorsque l'on se déplace le long de la droite.
La condition d'alignement de trois points dans l'espace s'écrit :
$$ \frac{ x - x_1 }{ x_2 - x_1 } = \frac{ y - y_1 }{ y_2 - y_1 } = \frac{ z - z_1 }{ z_2 - z_1 } $$
En posant $$ l = x_2 - x_1,\quad m = y_2 - y_1,\quad n = z_2 - z_1, $$ on obtient directement :
$$ \frac{ x - x_1 }{ l } = \frac{ y - y_1 }{ m } = \frac{ z - z_1 }{ n } $$
Les rapports directeurs $l, m, n$ tradhttps://www.andreaminini.eu/fr/math/equation-polaire-dune-droiteuisent les variations respectives des coordonnées entre les points $A$ et $B$.
- $l$ mesure la variation selon l'axe $x$.
- $m$ mesure la variation selon l'axe $y$.
- $n$ mesure la variation selon l'axe $z$.
Le triplet $(l, m, n)$ définit un vecteur directeur de la droite. Il en fixe la direction et le sens dans l'espace.
Remarque. Multiplier simultanément $l$, $m$ et $n$ par un même scalaire non nul ne modifie pas la direction. Deux droites sont parallèles si leurs rapports directeurs sont proportionnels : $$ \frac{l}{l'} = \frac{m}{m'} = \frac{n}{n'}. $$
Exemple
Considérons les points :
$$ A(1, -2, 3), \quad B(5, 4, 1) $$
Calculons les rapports directeurs :
$$ l = 5 - 1 = 4 $$
$$ m = 4 - (-2) = 6 $$
$$ n = 1 - 3 = -2 $$
Les équations fractionnaires de la droite $(AB)$ sont :
$$ \frac{x - 1}{4} = \frac{y + 2}{6} = \frac{z - 3}{-2} $$
Chaque fraction indique combien de fois on parcourt le vecteur directeur à partir du point $A$.
Le vecteur directeur est ici $ \vec{v} = (4, 6, -2) $.
Cas de rapports directeurs nuls. Si l'un des rapports directeurs est nul, la droite est parallèle à un plan de coordonnées :
- Si $l = 0$, la coordonnée $x$ reste constante. La droite est parallèle au plan $Oyz$.
- Si $m = 0$, la coordonnée $y$ reste constante. La droite est parallèle au plan $Oxz$.
- Si $n = 0$, la coordonnée $z$ reste constante. La droite est parallèle au plan $Oxy$.
Dans ces cas, les équations fractionnaires ne sont pas définies, car elles impliqueraient une division par zéro. On utilise alors une écriture adaptée indiquant explicitement la coordonnée constante.
Équations paramétriques
En posant les fractions égales à un paramètre $t$, on obtient :
$$ \begin{cases} \frac{x - x_1}{l} = t \\ \frac{y - y_1}{m} = t \\ \frac{z - z_1}{n} = t \end{cases} $$
En isolant les variables :
$$ \begin{cases} x = x_1 + l\,t \\ y = y_1 + m\,t \\ z = z_1 + n\,t \end{cases} $$
Ces relations sont appelées équations paramétriques de la droite.
Les équations fractionnaires apparaissent ainsi comme une écriture condensée de la même paramétrisation.
Exemple
À partir de :
$$ \frac{x - 1}{4} = \frac{y + 2}{6} = \frac{z - 3}{-2} $$
On pose :
$$ \begin{cases} \frac{x - 1}{4} = t \\ \\ \frac{y + 2}{6} = t \\ \\ \frac{z - 3}{-2} = t \end{cases} $$
On obtient :
$$ \begin{cases} x = 1 + 4t \\ \\ y = -2 + 6t \\ \\ z = 3 - 2t \end{cases} $$
Il s'agit des équations paramétriques de la même droite.
Coordonnées polaires d'une droite
- Une droite du plan peut également être décrite en coordonnées polaires.
- Si la droite passe par l'origine, il suffit de connaître l'angle $\alpha$ : $$ m = \tan \alpha,\quad \text{avec}\quad \alpha \neq \frac{\pi}{2} + k\pi. $$
- Si la droite ne passe pas par l'origine, on utilise la distance $d$ au pôle : $$ d = r \cos(\theta). $$
où $\theta$ est l'angle polaire d'un point $P$ de la droite.
Observations
Quelques remarques essentielles :
- L'équation d'une droite caractérise exactement ses points
Supposons qu'un point extérieur $P'(x, y')$ vérifie $$ ax + by + c = 0. $$
On aurait simultanément $$ ax + by + c = 0 $$ et $$ ax + by' + c = 0. $$
En soustrayant : $$ b(y - y') = 0. $$
Comme $b \neq 0$, il vient $y = y'$, contradiction. Donc seuls les points de la droite satisfont l'équation. - Toute équation linéaire définit une droite
Toute relation $$ ax + by + c = 0 $$ avec $(a,b) \neq (0,0)$, représente une droite du plan.
Démonstration. Si $a = 0$, la droite est parallèle à l'axe des abscisses. Si $b = 0$, elle est parallèle à l'axe des ordonnées. Dans le cas général, l'équation décrit une droite unique.
Et ainsi de suite.



